2021. 6. 30. 01:32ㆍ투자 일지

자동차 기술의 화두는 여전히 자율주행이다. 우선 자율주행 로드맵에 대하여 찾아보았는데 개념도 직관적이다. 위의 그림에서와 같이 운전자의 손을 보면 쉽게 이해가 되겠다. 3단계부터 핸들에 손을 좀 떼어도 되는 수준. 현재 스마트 크루즈컨트롤 기능으로 구현되어 상용화되었다. 그리고 4단계 부터는 손을 떼어도 큰 문제없는 수준. 현대자동차에 따르면 2021년에 4단계(고도자동화)의 상용화를 목표로 하고 있으며 2030년에 5단계 완전자동화 상용화를 목표로 한다고 한하는데 지금이 2021년인데 4단계가 상용화됬나? 기술은 있겠지만 신규자동차에 적용이 되고있는지는 의문이다.
자율주행에 필요한 핵심기술에 대해서도 좀 알아보았다. 현재 자율주행차는 영상처리기술을 기반으로 구현된다고 하니 카메라센서가 핵심이라고 생각하면 좋겠다. 테슬라가 비싼 라이다 센서 대신 카메라센서를 통해 자율주행을 구현하겠다고 선언한 상태.
고정밀지도라고 불리는 HD맵(HDMap, High Definition Map)이 자율주행 고도화에 필수기술이라고 한다. HD맵은 노면 표시, 차선 너비, 도로 굴곡 등 세부 정보를 3차원으로 표현해 자동차에 정보를 제공한며, 오차 범위 또한 25센티미터로 매우 적다고한다.
그리고 자율주행 시스템은 인공지능을 기반으로 하고 있으며, 기계학습을 통하여 고도화를 실현시킬수 있다고 한다. 그런데 이를 위해서는 177억km의 주행 연습이 필요하며, 이는 40km로 움직이는 자율주행차 100대가 365일 계속 주구장창 주행한다고 가정할때도 500년이 걸리는 수치. 즉 자동차 자체로 학습시키기에는 굉장히 오랜 시간이 걸린다는 점. 이말은 즉슨 정직하게 학습시키면 2500년이 돼야 자율주행차가 안정적으로 운행된다는 의미. 그런데 이 엄청난 학습량을 줄여줄 수 있는 기술은 자율주행 시뮬레이터라는 것.
즉 위의 내용을 정리하자면 영상처리기술+자율주행센서+자율주행시뮬레이터 자율주행차 기술의 핵심이라는 것. (라이더센서에 대한 언급은 없다. 단가가 계속 싸진다면 도움이되는 기술이 아닌가 싶은데, 이에 대해 추후 더 찾아봐야겠다.)
위의 결론에 따르면 국내 자율주행 관련주는 현대모비스/만도(영상처리기술), LG이노텍/세코닉스(카메라센서), 팅크웨어(3D지도)가 되겠다. 하지만 이게 실적으로 따라줘야할텐데 아직은 미미하지 않나라는 생각이다. 추후 각 회사 별 기술에 대한 분석과 수익구조에 대해서도 알아봐야겠다. 우선 이번에는 개론수준으로 기록한다.
자율주행 구현, 영상처리만으로 어려워
[ICT 레이더] 3가지 기술이 융합돼야 안전 확보 가능
2020.03.04 10:26 유성민 IT칼럼니스트
지난 2월 삼정KPMG는 2035년 자율주행차 시장 규모가 현재 대비 157배 이상 성장할 것으로 전망했다. 삼정KPMG는 ‘자율주행이 만드는 새로운 변화’ 보고서를 발간했는데, 해당 보고서에는 국내외 자율주행차 시장 규모 전망에 관한 내용이 담겨 있다.보고서에 따르면, 올해 전 세계 자율주행차 시장 규모는 71억 달러(약 8조5000억 원)에 이를 전망이다. 그리고 2035년에는 현재 대비 157배 규모인 1조 1204억 달러(약 1334조 4800억 원)로 성장할 전망이다. 2035년까지 연평균 40.13%씩 성장하는 셈이다. 국내 자율주행차 시장 규모도 빠르게 성장하고 있다. 삼정KPM는 올해 자율주행차 시장 규모가 1509억 원으로 전망했다. 그리고 2035년에 173배 이상 성장한 26조 1794억 원의 시장을 형성할 것으로 전망했다.
자율주행 안전이 우선

자율주행차 시장은 급변하고 있다. 지난 2월 포니에이아이(Pony.ai)는 외신 언론사를 통해 도요타로부터 4억 달러(약 4800억 원)의 투자를 신규로 유치했다고 밝혔다. 도요타는 기존에도 포니에이아이와 협력해 자율주행 시험을 진행해왔는데, 이번 투자로 기존 자율주행차 강자인 웨이모(Waymo)를 따라잡는 것이 목표라고 밝혔다. 참고로 웨이모는 알파벳(구글 모회사)의 자회사이다.
국내의 경우, 지난 3일 카카오모빌리티가 국토교통부로부터 자율주행 임시운행허가를 받았다. 이달 4일부터 5년간 임시운행이 가능하다. 카카오모빌리티는 자율주행기술을 독자적으로 확보해 2400만 명의 가입자에게 자율주행 공유 서비스를 제공하는 전략을 세우고 있다. 이를 위해 자율주행 외에도 ‘인공지능 기반 배차 알고리즘’과 같은 공유 서비스도 시범적으로 운영할 계획이다.
자율주행차 안전에 관한 화제도 끊이질 않고 있다. 테슬라 자율주행차 사고가 그중 하나이다. 2018년 3월 테슬라의 자율주행차 오작동으로 운전자가 사망하는 사고가 발생했다. 그리고 작년 12월에는 가벼운 접촉사고가 발생했다.자율주행차 사고는 테슬라에서만 발생한 것이 아니다. 2016년 구글은 처음으로 자율주행차 사고를 기록했다. 2018년 3월 우버의 경우, 보행자가 사망하는 사고가 발생하기도 했다. 이에 따라, 많은 사람이 자율주행차 시대의 기대와 함께 안전에 관한 우려도 나타내고 있다.
국토연구원은 1500명을 대상으로 자율주행차 편익과 우려에 관한 인식도를 조사했다. 주요 편익으로는 운전 피로도 감소와 다른 업무 처리 가능성이 꼽혔다. 반면 우려로는 자율주행시스템 사고와 유지관리비용 증가가 꼽혔다.
종합해보면, 자율주행의 편의성은 기대하고 있지만 안전성에는 우려를 표하고 있는 셈이다. 이는 운전자가 안전의 문제로 자율주행 선택을 꺼리게 할 수 있음을 시사한다. 따라서 안전 문제는 기술적으로 최대한 해결해 자율주행 안전성을 입증해야 한다. 다시 말해, 기존 자율주행 시스템을 보완하는 기술이 필요하다.
HD맵과 자율주행시뮬레이터로 안전성 향상
현재 자율주행차는 영상처리기술을 기반으로 구현된다. 다시 말해, 주변 환경을 영상으로 인식해 자율주행하는 방식이다. 좀 더 자세하게 설명하면, 자율주행차는 내부에서 부착된 영상 센서에서 정보를 얻어 통합하고 분석해 자율주행을 위한 명령을 내린다. 이러한 방식은 영상처리뿐만 아니라 영상 센서도 자율주행 안전성에 핵심으로 작용함을 알 수 있게 한다. 소니는 자체 개발한 자율주행차 ‘비전S(Vision-S)’를 선보이면서 33개의 센서를 자동차에 부착해 안전성을 높였다.
그러나 영상처리만으로는 부족하다. 영상처리로 자율주행차에 줄 수 있는 운행 정보는 한계가 있기 때문이다. 자율주행차의 영상 센서 인식 범위는 최대 200미터가 고작이다. 해당 거리는 시속 100킬로미터 속도로 달리는 자동차가 7초 만에 도달할 수 있는 거리이다. 따라서 자율주행차는 영상처리만으로 도로 환경 대처하기 어렵다. 예를 들어 200미터 이상의 곡선 도로 상황에 대처할 수 없다. 그뿐만 아니라 영상 오류로 인한 사고도 무시할 수 없다. 악천후 상황에서 자율주행차의 영상 센서는 주변 환경을 제대로 인식하지 못할 위험이 있다. 특히 도로 노면을 오인식해 사고가 발생할 수 있다.
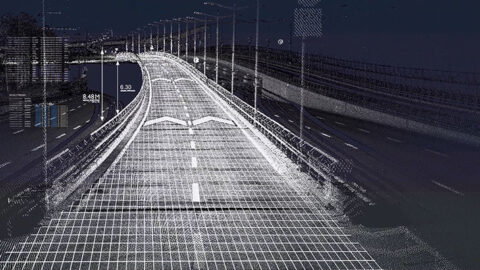
HD맵 모습 ⓒ현대자동차
고정밀지도라고 불리는 HD맵(HDMap, High Definition Map)은 이러한 문제점의 해결책이 될 수 있다. HD맵은 기존 지도 정보와 달리 노면 표시, 차선 너비, 도로 굴곡 등 세부 정보를 3차원으로 표현해 자동차에 정보를 제공한다. 오차 범위 또한 25센티미터로 매우 적다.
HD맵은 자율주행차에 더 넓은 범위의 정보를 제공할 수 있을 뿐만 아니라 영상 처리의 오인식 문제를 해결할 수 있다. 좀 더 구체적으로 설명하면, HD맵은 자율주행차가 영상으로 인식할 수 있는 범위를 초과해 정보를 제공할 수 있다. 아울러 악천후 환경에도 정확한 정보를 제공해 자율주행차가 오인식하는 문제를 해결한다.
자율주행차의 정보 수집 한계는 HD맵으로 극복할 수 있다. 그럼 자율주행차의 핵심인 자율주행시스템 운행 능력은 어떨까? 참고로 자율주행시스템은 인공지능(AI)을 기반으로 하고 있는데, 기계학습 알고리즘이 주로 활용된다. 다시 말해, 자율주행 방법을 스스로 경험해서 원리를 취득하는 방식이다. 이러한 이유로, 자율주행차 운행 연습량이 중요하다.
자율주행차는 얼마큼 연습해야 안전할까? 싱크탱크 연구소 ‘랜드 연구소(RAND Corporation)’가 이에 답을 준다. 랜드 연구소는 미국 교통통계국(Bureau of Transportation Statistics)에서 조사한 2015년의 교통 사망률(1.09%)을 기반으로 110억 마일(약 177.02억 킬로미터)의 주행 시험이 필요한 것으로 분석했다. 이는 시간당 25마일(약 40.23킬로미터)을 달리는 자율주행차 100대가 365일 동안 계속 주행 시험을 하는 것을 기준으로 500년이 걸린다.
삼정KPMG는 2035년에 자율주행차 시대를 예고했다. 그런데 랜드 연구소의 전망은 2500년이 돼야 자율주행차 확산을 기대할 수 있게 한다. 물론, 자율주행차 학습량을 해결할 기술이 존재한다. 자율주행 시뮬레이터가 이에 해당한다. 자율주행 시뮬레이터는 가상 환경에서 자율주행차 시스템이 주행을 학습할 수 있게 하는 기술이다. 알파고가 수 천년 동안 익힐 수 있는 기보를 가상 세계에서 36시간 만에 익힌 것처럼, 자율주행차는 시뮬레이터를 통해 수많은 학습량을 순식간에 익힐 수 있다. 가상세계에는 물리적 제약을 받지 않기 때문에 가능하다. 참고로 작년 7월 웨이모 최고경영자인 존 크라프칙 (John Krafcik) “50억 마일(80.46킬로미터)의 주행 시험을 자율주행 시뮬레이터를 통해서 진행했다”고 밝혔다.
정리하면, 자율주행차의 안전성을 높이기 위해서는 영상처리기술 외에도 자율주행센서와 자율주행시뮬레이터 등 두 가지 기술이 융합돼야 한다.
출처 : https://www.hyundai.co.kr/TechInnovation/Autonomous/Roadmap.hub
'투자 일지' 카테고리의 다른 글
| [자동차 산업] 현대차, 솔리드에너지시스템(SES) 1억달러 투자 (0) | 2021.07.05 |
|---|---|
| [투자회사 분석] 아미코젠 기업분석 + 실적 전망 (0) | 2021.07.04 |
| [자동차 산업] 삼성SDI, LG에너지솔루션이 스텔란티스 배터리 물량을 가져올 수 있을까? (2) | 2021.06.25 |
| [로봇 산업] 보스턴 다이나믹스를 품은 현대차 (0) | 2021.06.24 |
| [자동차 산업] 미국의 픽업트럭 시장과 점유율에 대하여 (2020년 기준) (0) | 2021.06.23 |